The demonstrator, which is being implemented in early 2021, will allow the design, testing, and validation of new artificial intelligence algorithms, as well as new autonomous control strategies based on reinforcement learning. It will also be used for the development of new approaches to identifying non-linear systems based on deep learning. Finally, the coupling of QCARs with the virtual environment will allow the exploration of transfer learning methods.
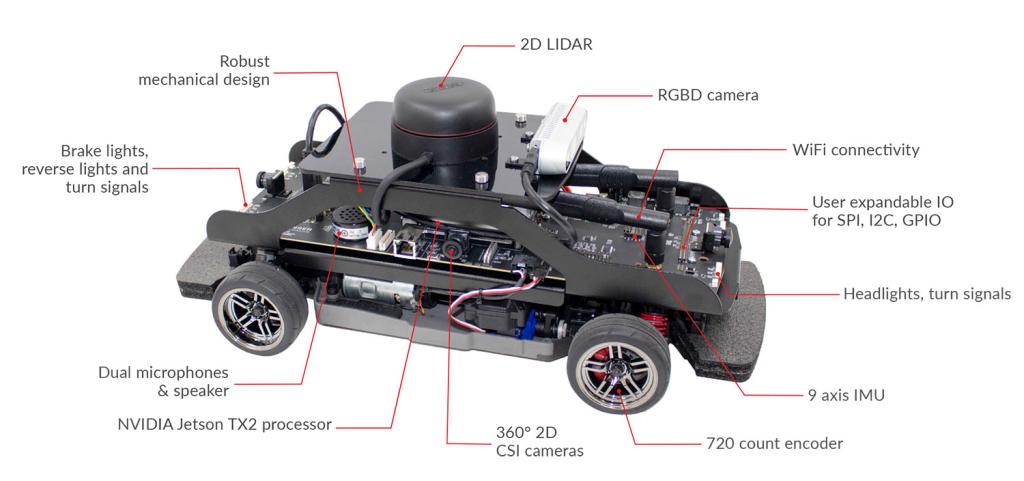
The demonstrator, hosted at Polytech Nancy, consists of a supercomputer and two QCARs. The QCAR is a 1/10 scale model of an autonomous car. It is equipped with the NVIDIA JETSON TX2 supercomputer and numerous sensors including a 360° camera, an RGDB camera, and a Lidar. It also includes a real-time vision system and a laser guidance system (Figure 19)
This demonstrator has an open architecture and allows the development of artificial intelligence algorithms to move autonomously in a real physical environment simulating streets, intersections, traffic lights, obstacles, etc. The platform also allows simulation in a virtual environment and its coupling with the real world (Figure 20). Based on a set of software tools, the platform creates a virtual environment that the physical QCAR will treat as an actual real environment (digital twin).
Virtual environments are extremely modular and allow the study in simulation of a single agent or multiple agents (fleet control). The platform also allows the creation of virtual environments that are difficult to study in reality, such as engine degradation in the virtual domain leading to total system failure and its investigation in the real domain.
