As part of a CEA-Tech Lorraine resourcing project, the French Alternative Energies and Atomic Energy Commission, funded by the Grand Est Region and the FEDER, Tommaso Borzone completed his thesis "Decentralized control of multi-agent systems: a hybrid formalism", under the direction of Irinel-Constantin Morarescu and Marc Jungers in the CID department of the CRAN in collaboration with the CEA LIST in Saclay, co-supervised by Michael Boc and Christophe Janneteau. The CEA Tech Metz manager is Benoît Marchand.
This same CEA-Tech resourcing project also allowed the realization of an experimental platform in order to show a new technology to CEA-Tech clients in the region. Technology resulting from the theoretical contributions of the thesis. Interest is focused on the missions of rendezvous and training for non-holonomic mobile robots.
In recent years, multi-agent problems have been intensively studied by the control theory community. One of the most popular multi-agent control topics is the consensus problem where a group of agents reaches an agreement on the value of a certain parameter or variable.
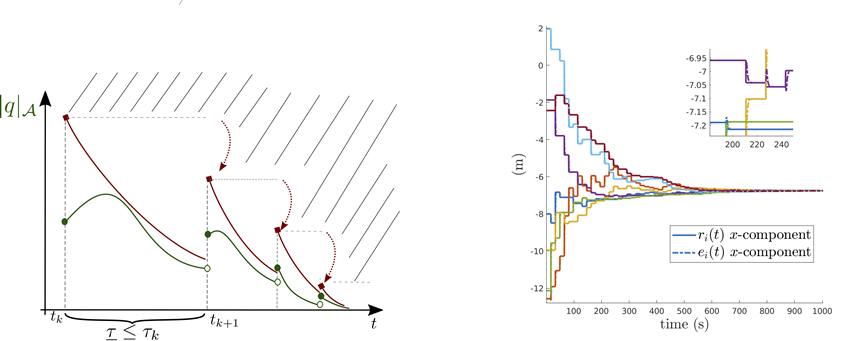
In this work, we focus our attention on the consensus of agent networks with nonlinear reference tracking dynamics. First, we use sporadic interactions modeled by relative detection, to address decentralized reference consensus. The reference is therefore used to feed the pursuit dynamics of each agent. Unlike existing works, the stability analysis of the global system required the use of theoretical tools specific to hybrid systems theory (see figure 23), due to the dual nature of the two-step approach. The analysis is performed taking into account different topology and interaction scenarios. For each case, a sufficient stability condition is provided, in terms of the minimum time allowed between two consecutive reference updates. Several publications are associated with this work.
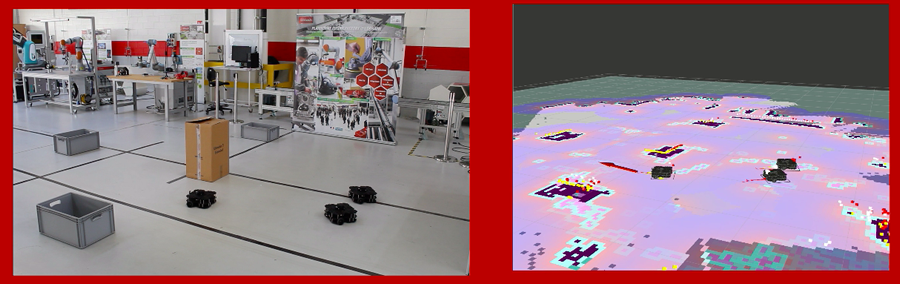
A control strategy for a fleet of vehicles to perform formations has been proposed using distributed techniques of multi-agent systems and hybrid systems theory. An experimental platform was carried out in the framework of this project on the FFLOR platform of CEA Tech Metz in Trémery, see figure 24. It consists of three ROBOTIS Turtelbot 3 robots. The set simulated via ROS is compared to the real platform, see figure 25.