This cell was mainly developed as part of the ERT and the CPER SGE (Sciences and Environmental Engineering) whose primary objective was to structure the Bois d’Epinal Campus in support of the Fibres Grand’Est Competitiveness Cluster (period 2007-2013, today fibres-energivie cluster) of a demonstration platform of a semi-industrial assembly/disassembly chain. It offers a test environment allowing to:
— implement, test and compare different traceability techniques (invasive or not) within the logistics chain in general and the wood sector in particular;
— offer a test environment allowing the implementation of production scenarios in a centralized, distributed or hybrid context (HMS - Holonic Manufacturing Systems).
Since 2017, our research activities have focused on a new axis around the agility of manufacturing systems based on AGV or AMR mobile entities with two dimensions:
— the agility of the physical part of the manufacturing system, where mobile entities are a response to face the different forms of variability (rapid market changes, re-sequencing, breakdowns. . .). The scientific challenges concern the way to organize flows efficiently (which entities will be mobile: products, machines or both? what flexibility of routing can be allowed? Do entities follow predefined paths, should they choose from several given paths or should they plan their path to the destination. . .).
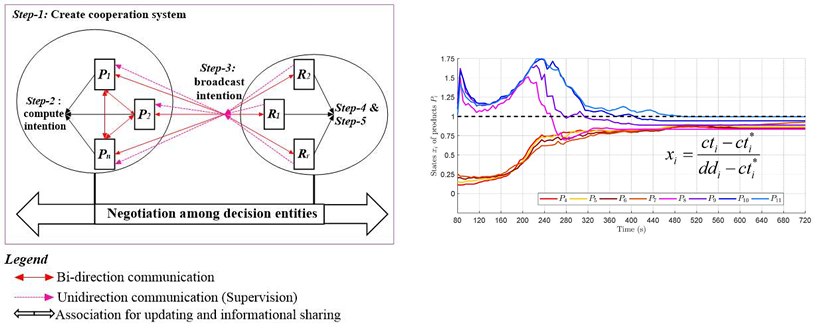
— agility at the level of the control system and in particular the question of coordination and cooperation between the mobile elements, since all these elements will remain in a common space that they will have to share. It will therefore be necessary to ensure the cooperation and coordination of the different decisions in order to avoid collisions, for example, and that local decisions do not degrade the performance at the global system level. The aim here is to determine how to distribute intelligence correctly (embarkability) between the different entities, whether mobile or not, to design the role(s) and behavior(s) of each entity, the negotiation or consensus algorithms allowing the manufacturing system to remain agile without degrading overall performance.
The cell, installed in a space of more than 100 m2 on the P. Séguin campus in Épinal, integrates different technologies constituting cyber-physical systems. It is structured in four zones that can exchange product flows. Each of these zones integrates automated equipment for conveying products and executing transformations (assemblies, disassemblies, markings, etc.), controlled, thanks to a field bus, by an industrial programmable logic controller. Identification instruments (RFID) and real-time location (RTLS) of the product allow fine synchronization between the "physical" products and their computer representation.
Since 2016, several actions have been taken to increase the possibilities of this cell for research, transfer, and teaching, thanks in particular to various funding (CPER Cyber-Entreprises, 2015-2020) or funding as part of the Pacte Lorrain for engineering schools in 2018 which allowed the acquisition of 4 FANUC robots (LRmate) installed on the platform. More recently, in 2021 and with the aim of bringing more agility to the current installation, a funding of 30 kC was granted by the University of Lorraine for the purchase of an AMR (Autonomous Mobile Robot), which is currently being integrated.
From a software point of view, the experiments are based on a multi-agent approach, using a set of software specifically developed with the JADE library. In this approach, each element of the cell is associated with an agent, a modular component capable of discovering its environment, executing behaviors, and collaborating with other agents in the logic of a cyber-physical system. The control proposals resulting from the research activities are therefore tested and then integrated as new types of agents.