Visible Light Communication (VLC) technology has many advantages and attracts the attention of various stakeholders (researchers, start-ups, large groups, . . .). Indeed, this technology uses already deployed lighting infrastructures to provide both lighting and wireless communication, while benefiting from a very wide bandwidth.
Among these applications, indoor positioning systems (VLC-IPS) are the subject of much research.
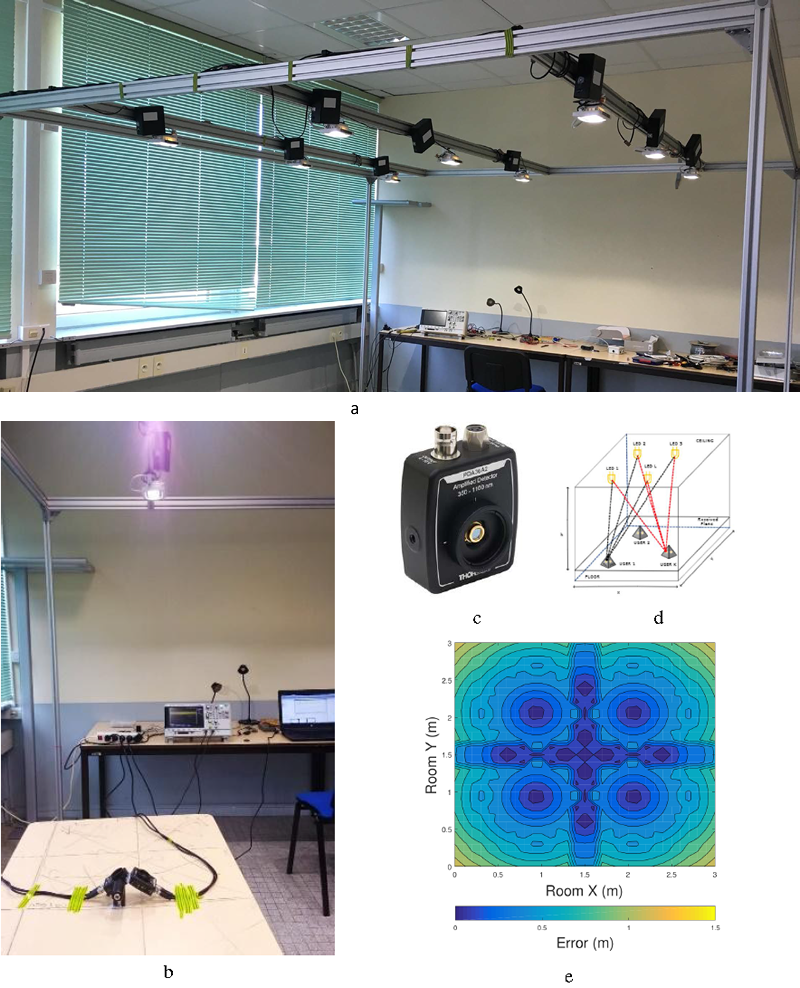
The objective of this demonstrator is to test the performance of indoor localization techniques based on VLC technology. The position of mobile objects can be estimated using two main categories of algorithms:
— “range-based” algorithms calculate the position of the mobile object based on characteristics of the received signal such as power, arrival time, arrival angle, etc. These signal characteristics are strongly affected by observation, reflections on walls, dust, or smoke potentially suspended in some indoor environments. These disturbances thus impair the robustness of these algorithms, generally recognized for their accuracy;
— “range-free” algorithms use only connectivity information to perform localization and signal characteristics are not taken into account. Even if the accuracy obtained in the end is generally less good than that obtained by range-based approaches, this approach is not (or little) sensitive to problems of light reflections and problems of partial occlusions.
This demonstrator allows the implementation of different algorithms and the validation of new approaches. We are particularly interested in defining an indoor localization system that is accurate but also robust for use in highly disturbed environments such as underground mines.
The demonstrator consists of 9 LED lamps, each equipped with a programmable modulator allowing a signal to be injected into the emitted light. These lamps are distributed on an adaptable support structure of 3m by 3m, at a height of 2 m. Receivers with different characteristics (sensitivity, viewing angle, . . .) can be used to test the performance of each indoor localization technique. The demonstrator also offers visualization, acquisition, and signal conversion tools.